Domů
› martinre
› RC modely - Coptéry
› AeroQuad (prodán) › Album RC modelu
Seznam oblíbených modelů je prázdný – stiskněte  pro přidání do oblíbených
pro přidání do oblíbených
AeroQuad (prodán)







Parametry
Výrobce: aeroquad / homemade
Kategorie: Quadcopter
Materiál: Jiný materiál
Pohon: Elektro motor
Rozpětí ramen: 600 mm
Váha: 900 g
Motor: 4xKDA 20-22L
Elektronika: arduino, aeroquad, ESC 4xmystery 30A
Baterie: turnigy 3s 2600mAh, 2s 500mAh
Hodnocení
Popis
Po úspěšné stavbě tricoptera jsem se pustil do quadrocoptera. S velkého množství různých výrobců jsem se rozhodl pro aeroquad především kvůli otevřenému kódu, který si sám mohu upravovat a doplňovat. Tento projekt založený na Arduino platformě, má velkoupodporu komunity a je neustále vyvíjen.
Hlavní řídící jednotkou je Arduino Mega, na kterém je shield osazený senzory. V současné době ho mám osazen senzory od firmy Sparkfun. A to tříosé gyro, tříosý akcelerometr, tříosý magnetometr a barometrický senzor. Tento rok ještě desku osadím GPS a Xbee shieldem pro telemetrii a online nastavení letových parametrů. I přes použití levných regulátorů připojených přes PWM je odezva perfektní.
K ovládání stačí 6 kanálů, bez jakéhokoliv mixu ve vysílači. 4 kanály slouží k samotnému ovládání, 5. je pro přepínání acro a stable módu a 6. pro zamknutí a udržení výšky. Po připojení Xbee je možné model ovádat klavesnicí, joystickem atp.
V současné době létam v X configuraci-dva motory vepředu, dva vzadu. Pro změnu na + konf. stačí pouze zakomentovat jeden řádek kódu a otočit senzorovou desku.
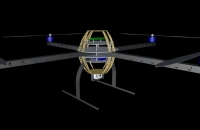
Rám je z duralu 1.5 mm, ramena z hliníkových profilů 15 mm z bauhausu, první patro ze sklotextilu 1.5 mm. Celá řídící elektronika je uložena na silentblocích a vše je schováno před prachem a nečistotami v plastové, potravinové krabičce. Podvozek je zatím provizorní z nařezané trubky, celkově na tom bude ještě spousta úprav. Na posledním obrázku je můj vlastní koncept, jak bych chtěl, aby to jednou vypadalo:).
Model ještě není zdaleka hotov-přibude ještě horní patro pro GPS anténu a spodní pro baterie. Také přibudou velké podvozkové nohy. Shield má velké možnosti dalšího rozšíření-analogové vstupy pro připojení ultrazvukových senzorů, pripojení LED diod pro signalizaci stavu baterie, výstupy na serva pro automatické rovnání kamery, možnost připojení regulátorů přes I2C.
Z létaní jsem nadšen, je to perfektní stroj pro FPV.
Hlavní řídící jednotkou je Arduino Mega, na kterém je shield osazený senzory. V současné době ho mám osazen senzory od firmy Sparkfun. A to tříosé gyro, tříosý akcelerometr, tříosý magnetometr a barometrický senzor. Tento rok ještě desku osadím GPS a Xbee shieldem pro telemetrii a online nastavení letových parametrů. I přes použití levných regulátorů připojených přes PWM je odezva perfektní.
K ovládání stačí 6 kanálů, bez jakéhokoliv mixu ve vysílači. 4 kanály slouží k samotnému ovládání, 5. je pro přepínání acro a stable módu a 6. pro zamknutí a udržení výšky. Po připojení Xbee je možné model ovádat klavesnicí, joystickem atp.
V současné době létam v X configuraci-dva motory vepředu, dva vzadu. Pro změnu na + konf. stačí pouze zakomentovat jeden řádek kódu a otočit senzorovou desku.
Rám je z duralu 1.5 mm, ramena z hliníkových profilů 15 mm z bauhausu, první patro ze sklotextilu 1.5 mm. Celá řídící elektronika je uložena na silentblocích a vše je schováno před prachem a nečistotami v plastové, potravinové krabičce. Podvozek je zatím provizorní z nařezané trubky, celkově na tom bude ještě spousta úprav. Na posledním obrázku je můj vlastní koncept, jak bych chtěl, aby to jednou vypadalo:).
Model ještě není zdaleka hotov-přibude ještě horní patro pro GPS anténu a spodní pro baterie. Také přibudou velké podvozkové nohy. Shield má velké možnosti dalšího rozšíření-analogové vstupy pro připojení ultrazvukových senzorů, pripojení LED diod pro signalizaci stavu baterie, výstupy na serva pro automatické rovnání kamery, možnost připojení regulátorů přes I2C.
Z létaní jsem nadšen, je to perfektní stroj pro FPV.
Komentáře
4.1.2011 19:56 -------------
Na rcmanii to několik lidí má, tak se zeptej tam. Já s tím zkušenosti nemám, je to úplně něco jiného než je ten aeroquad
4.1.2011 19:38 -------------
tak toto:http://www.kkmulticopter.kr/index.html?modea=vieweng&mc_selected=MultiCopter&sc_selected=KKMulticopter&sn=multicopter_v02_x&id_no=18
je schopné to jet ve všech režimech? asi je nutné přehrání FW, je volně dostupné?
4.1.2011 19:18 -------------
Myslel si asi toto: http://www.kkmulticopter.kr/
4.1.2011 18:56 -------------
takže stačí tato deska? http://www.multicopter.kr/goods/view.php?seq=1
jinak objednával někdo z tama? ta cena je v jakých penězích :-)
3.1.2011 20:56 -------------
Myslím, že s těma vrtulema to není tak špatný. Na tom odkaze co jsem sem dával je mají skoro pořád a i jinde se dají sehnat. Jsou sice dražší, ale dá se to. Do tricoptera bych šel už jedině s řidící deskou, 4gyro není to pravý.
3.1.2011 20:37 -------------
Super. Já zrovna dokončuju tricoptéru. Ale pokukuju po řídící desce od KK Multicopter (http://www.multicopter.kr) a zvažuju zda udělat zase tricoptéru nebo quadocptéru. Od quadcoptéry mě odrazuje kritický nedostatek pravotočivých vrtulí... :(Každopádně dobrá práce!
3.1.2011 13:34 -------------
tady jsem to kupoval: https://www.aeroquadstore.com
3.1.2011 13:30 -------------
na kolik tě vyšla ta řidici jednotka?
2.1.2011 19:13 -------------
No koupil jsem součástky, pak to spájel dohromady, nahrál software a postavil vlastní rám. Celý jsem to samozřejmě nevymyslel:)Jasně, že budu kombatit. Už se nemůžu dočkat.
2.1.2011 18:30 -------------
To je dost dobrý, a jestli jsi to dělal komplet sám tak 5 je málo. No a myslíš že budeš ještě kombatit na BS nebo i jinde?
2.1.2011 16:04 -------------
no to este uvidime.. zatim je tam enom akcelerometr, podle chovani ve vzduchu budem doplnvat dalsi veci. Ale asi bude rozumny tam dat to gyro
2.1.2011 15:23 -------------
Stabilní je to dost. V acro modu-je aktvivni pouze gyro, ale ve stable to společně s akcelerometrem drží samo rovinu, jenom to driftuje, tomu zamezí až gps. Zatím s tím lítam jen dva dny, takže ještě nemam úplně vyladěný PID nastavení pro jednotlivý mody. Bude to chtít ješte hodně nastavování a zkoušení. To tam chcete mít pouze akcelerometr bez gyra?
2.1.2011 14:42 -------------
Nam to rizeni jede vpohode, zatim sme to teda zkouseli jen na servech.... ale bude este potreba doladit nake mouchy. Je tam drobny ruseni a chce to zvysit frekvenci cipu. Su zvedavy jak se to bude chovat ve vzduchu:D Ty myslim se stabilitou nemas problem ze?
2.1.2011 14:11 -------------
Kamarád taky staví vlastní elektroniku založenou na picaxe, myslím, že PICAXE-40X, zatím to propojil s tím tříosým akcelerometrem. Já jsem taky spíš přes konstrukci :)
2.1.2011 14:01 -------------
dik, o te elektronice moc nevim protoze na to se specializuje kamos (delame to dva.. ja konstrukce kamos rizeni) co vim tak je to zalozene na cipu picaxe-18M2 a ke stabilizaci je tam 3osy akceleromet... zatim je to ve vyvojit tak senzory a cidla teprve planujeme. Ale urcite tam bude ultrazvukovy dalkomer kvuli letu a vyseni tesne nad zemi, a pak naky ten barometricky senzor. Motory jsou tam turnigy 3632-1500 a baterka lipol 3s5800mAhEste toho quadrocoptera nemam slepenyho, protoze cekam na folii ale jak to bude hotovy tak ho sem na rcalbum urcite hodim a aj na web
2.1.2011 13:47 -------------
2.1.2011 13:43 -------------
Díky, pošli mi nějaké info o tom tvém, zajíma mě ta elektronika, senzory, program atd. Jestli to je teda GNU:), na webu máš pouze info o stavbě. Vrtule jsem koupil přímo zde: https://www.aeroquadstore.com/SearchResults.asp?Cat=32
2.1.2011 13:32 -------------
No parada, u me za5 :-) taky mam quadrocoptera ale s vlastni elektronikou... jen se chci zeptat, kde si sehnal tyto vrtule s opacnou rotaci?
Navštivte také největší modelářské fórum RCMANIA.cz
© 2026 RCAlbum.cz - všechna práva vyhrazena
Jak přidat můj model |
O serveru |
Podmínky |
Kontakt |
Ikonka |
Nápověda
Podívejte se na novinky zbrusu nového RCAlba